MapPoEng = Mapping of Potential Energy
Mapování Potenciální Energie
říjen 2015, Petr Frantík
poslední aktualizace: únor 2017
http://mappoeng.kitnarf.cz
Aplikace MapPoEng slouží k vytváření projekcí funkcí potenciální energie mechanických systémů do dvourozměrných map, viz obr. 1. Tyto mapy odhalují vlastnosti rovnovážných statických stavů systémů, slouží pro analýzu jejich stability a hledání bifukačních bodů.
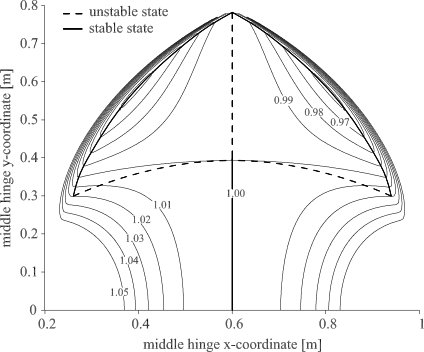
Obr. 1: Příklad výsledné mapy potenciální energie (symetrického von Misesova nosníku) vypočtené pomocí aplikace MapPoEng.
Aby bylo možno aplikaci MapPoEng spustit, musí být v operačním systému nainstalována Java platforma (verze 1.8 a pozdější). Platformu lze stáhnout z adresy http://www.java.com/en/download/manual.jsp. Je-li Java platforma správně nainstalována, lze soubor aplikace mappoeng.jar spustit.
Aplikace MapPoEng se spouští buď přímo (kliknutím na soubor mappoeng.jar) nebo z konzoly operačního systému (pokud jí systém disponuje). Spuštění z konzoly je vhodné pro hromadné zpracování a pro sledování podrobných varovných či chybových výpisů. Spuštění z konzoly se provede zapsáním následujícího řetězce do konzoly operačního systému (v případě, že jsme přítomni v adresáři, kde je umístěn soubor mappoeng.jar):
java -jar mappoeng.jar
Aplikace MapPoEng analyzuje model určený v souboru definition.xml, jenž se musí nacházet v adresáři spolu se souborem aplikace. Soubor je typu XML, viz [2], díky kterému lze snadno číst a upravovat běžnými editory prostého textu, např. [3],[4],[5].
Soubor obsahuje data pro vytvoření modelu prutové konstrukce včetně způsobu její analýzy. Abstraktní struktura souboru je následující:
Kontejner
Model
Materiály
Průřezy
Styčníky
Pruty
Rámové vazby
Mapování
Nástroj k uchycení bodu
Mapovací nástroje
Nastavení pro dynamický výpočet
Tlumení
Numerická metoda
Kontejner (Container) je objekt, který sdružuje všechny ostatní objekty. Zajišťuje jejich vytvoření v pořadí, v jakém jsou uvedeny v souboru. Kontejner slouží rovněž jako databanka jejich referencí. Každý objekt v kontejneru má index, jehož hodnota odpovídá jeho pořadí v kontejneru, přičemž se počítá od nuly. Lze použít i záporné číslo, které značí index předcházející indexu aktuálního objektu. Aby bylo možno vytvořit stabilnější indexování, je k dispozici značkovací objekt Návěští (Label), díky kterému lze indexování vztáhnout relativně k indexu tohoto objektu, viz příklad dále.
Model je abstrakcí struktury složené ze styčníků a prutů, respektive z hmotných bodů a pružin. Styčníky je třeba definovat pro vzájemné spojení více prutů, umístění podpor a určení počátku a konce každého prutu.
Materiál (Material) definuje hodnoty fyzikálních parametrů hmoty konstrukce. Jedná se především o modul pružnosti a hustotu látky, kterou je konstrukce tvořena.
Průřez (Crosssection) stanovuje hodnoty geometrických parametrů průřezů prutů konstrukce. Jedná se především o plochu průřezu a tzv. druhý moment plochy (moment setrvačnosti průřezu).
Styčník (Joint) je bodem, kde začínají a končí pruty, kde dochází k jejich spojení a kam se umísťují podpory.
Prut (Beam) je abstrakcí tělesa s převládajícím jedním geometrickým rozměrem oproti zbývajícím dvěma. V aplikaci MapPoEng prut spojuje dva styčníky pružnou vazbou tvořenou hmotnými body a pružinami, tzv. FyDiK modelem prutu, viz [6].
Rámová vazba (FrameBind) vytváří ohybové provázání dvou prutů. Bez tohoto provázání se styčník dvou prutů chová jako kloub.
Mapování sdružuje definici metod a jejich parametrů sloužících pro analýzu chování modelu konstrukce.
Nástroj k uchycení bodu (PointRestrainer) slouží pro nalezení hmotného bodu, který bude pro účely analýzy uchycen (viz řízené posunutí).
Mapovací nástroje (Mappers) definují způsob a pořadí, jakým bude prováděna analýza modelu konstrukce, viz Řízení výpočtu.
Nastavení pro dynamický výpočet obsahuje další nastavení a metody pro provedení analýzy.
Tlumení (Damping) je součást dynamické simulace modelující tzv. útlum a sloužící pro ustálení systému do statického rovnovážného stavu.
Numerická metoda (NumericalMethod) umožňuje vybrat metodu výpočtu diferenciálních rovnic modelu pro jeho dynamickou simulaci.
Následuje ukázka obsahu definičního souboru pro analýzu rámu tvořeného dvěma pruty spojenými v rámovém styčníku:
<Container package="cz.kitnarf.io.xml">
<!--MATERIALS-->
<Steel package="cz.kitnarf.materials.steel" />
<!--CROSSSECTIONS-->
<NumericCrosssection package="cz.kitnarf.crosssection" area="0.008457" secondAreaMoment="1.32e-5" />
<!--JOINTS-->
<Label package="cz.kitnarf.io.xml" name="POINTS" />
<Joint package="cz.kitnarf.energymapping.io" x0="-5" y0="0" restraintX="true" restraintY="true" />
<Joint package="cz.kitnarf.energymapping.io" x0="0" y0="5" restraintX="false" restraitY="false" />
<Joint package="cz.kitnarf.energymapping.io" x0="5" y0="0" restraintX="true" restraintY="true" />
<!--BEAMS-->
<Label package="cz.kitnarf.io.xml" name="BEAMS" />
<Beam package="cz.kitnarf.dynamicalsystem.space2d.macro"
pointA="container[label[POINTS,0]]" pointB="container[label[POINTS,1]]"
segmentCount="10"
material="container[0]" crosssection="container[1]"
/>
<Beam package="cz.kitnarf.dynamicalsystem.space2d.macro"
pointA="container[label[POINTS,1]]" pointB="container[label[POINTS,2]]"
segmentCount="10"
material="container[0]" crosssection="container[1]"
/>
<!--FRAME BINDS-->
<FrameBind package="cz.kitnarf.dynamicalsystem.space2d.macro" beamA="container[label[BEAMS,0]]" beamB="container[label[BEAMS,1]]" />
<!--MAPPERS-->
<BeamPointRestrainer package="cz.kitnarf.energymapping.io" beam="container[label[BEAMS,1]]" pointIndex="0" />
<KeyboardControl package="cz.kitnarf.energymapping" stepX="0.05" stepY="0.05" />
<SnakeX package="cz.kitnarf.energymapping.mappers" simulationTime="5" stepX="0.05" stepY="-0.05" countX="200" countY="200" startOffsetX="-5" startOffsetY="0" />
<!--DAMPING and METHOD-->
<ModelDamping package="cz.kitnarf.energymapping.io" size="1000"/>
<SymplecticEulerMethod package="cz.kitnarf.dynamicalsystem" timeStep="0.0001"/>
</Container>
K dispozici jsou dva druhy metod ovládání výpočtu (Mapovací nástroje):
Plná funkčnost tohoto nástroje je spojena se zobrazením okna příkazového řádku, kam se vypisují aktuální údaje. Aplikaci je tedy vhodné spustit z tohoto okna, viz Spuštění aplikace. K dispozici jsou následující ovládací klávesy:
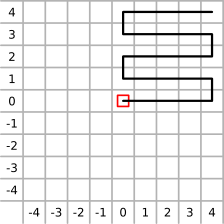
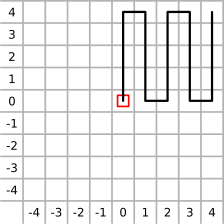
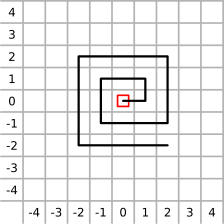
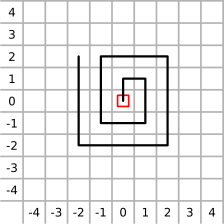
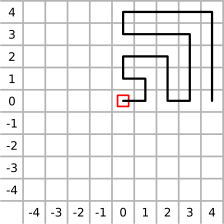
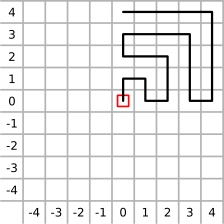
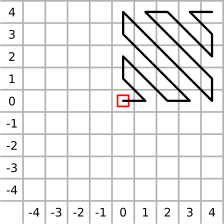
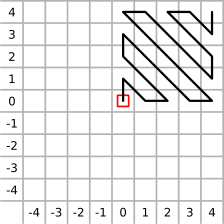
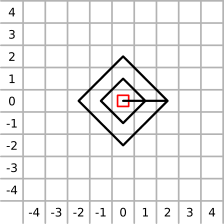
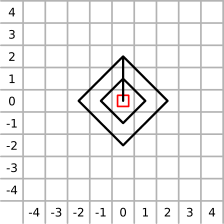
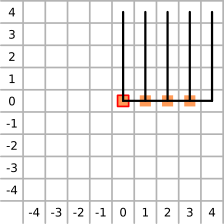
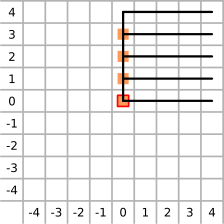
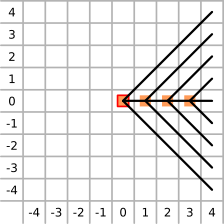
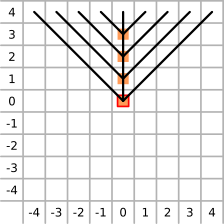
Tyto nástroje provádějí mapování potenciální energie v pravidelné mřížce rovnoběžné se souřadnými osami. Výpočet hodnot probíhá pomocí posunutí zachyceného bodu mezi sousedními body mřížky. Po každém posunutí zachyceného bodu se model ustaluje po dobu určenou parametrem čas simulace (simulationTime). Posunutí je prováděno různými postupy (viz také obrázek 2):
| SnakeX | SnakeY | SpiralX | SpiralY |
 |
 |
 |
 |
| LabyrinthX | LabyrinthY | DiagonalSnakeX | DiagonalSnakeY |
 |
 |
 |
 |
| DiagonalSpiralX | DiagonalSpiralY | CombX | CombY |
 |
 |
 |
 |
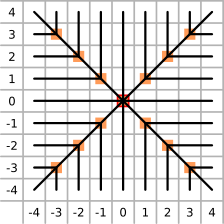
| DiagonalCombX | DiagonalCombY | DiagonalBaseComb | |
 |
 |
 |
 |
Obr. 2: Zobrazení postupu mapovacích nástrojů (znázorněno ve spolupráci s Martinem Kalinou).
Aplikace MapPoEng produkuje výstup ve formě tabulek čísel s vypočtenými hodnotami energie a složek reakce bodu upevnění, viz tabulka 1 vypočtená z definičního souboru definition.xml (výstupní soubor spreadsheet_energy.txt).
Každý automatický mapomací nástroj může být v definičním XML souboru rovněž doplněn atributem saveImage=true, který zajistí ukládání každého kroku vizualizace do obrázku typu PNG dle nastavení okna aplikace. Před započetím mapování má uživatel 10 sekund na nastavení okna.
Pro zobrazovnání rozsáhlých výsledných tabulek lze s výhodou použít aplikaci FuVis, viz [7].
| y\x | 0 | 0.05 | 0.1 | 0.15 | 0.2 | 0.25 | 0.3 | 0.35 | 0.4 | 0.45 |
| 5.45 | null | null | null | null | null | null | null | null | null | 1.02E+08 |
| 5.4 | null | null | null | null | null | null | null | null | 8.05E+07 | 9.08E+07 |
| 5.35 | null | null | null | null | null | null | null | 6.16E+07 | 7.07E+07 | 8.06E+07 |
| 5.3 | null | null | null | null | null | null | 4.53E+07 | 5.31E+07 | 6.18E+07 | 7.10E+07 |
| 5.25 | null | null | null | null | null | 3.14E+07 | 3.81E+07 | 4.54E+07 | 5.34E+07 | 6.22E+07 |
| 5.2 | null | null | null | null | 2.01E+07 | 2.55E+07 | 3.16E+07 | 3.84E+07 | 4.58E+07 | 5.39E+07 |
| 5.15 | null | null | null | 1.13E+07 | 1.55E+07 | 2.03E+07 | 2.58E+07 | 3.19E+07 | 3.88E+07 | 4.63E+07 |
| 5.1 | null | null | 5024215 | 7926038 | 1.15E+07 | 1.57E+07 | 2.06E+07 | 2.61E+07 | 3.24E+07 | 3.93E+07 |
| 5.05 | null | 1255936 | 2897982 | 5186393 | 8126915 | 1.17E+07 | 1.60E+07 | 2.09E+07 | 2.66E+07 | 3.29E+07 |
| 5 | 1.08E-18 | 378786.1 | 1401114 | 3070306 | 5395107 | 8384360 | 1.20E+07 | 1.64E+07 | 2.14E+07 | 2.72E+07 |
| 4.95 | null | 117745 | 519572.9 | 1584263 | 3293046 | 5651058 | 8702325 | 1.24E+07 | 1.69E+07 | 2.20E+07 |
| 4.9 | null | null | 225758.9 | 670947.2 | 1798592 | 3560033 | 5957237 | 9083801 | 1.29E+07 | 1.74E+07 |
| 4.85 | null | null | null | 345830.1 | 835673.1 | 2044945 | 3872164 | 6316707 | 9532065 | 1.35E+07 |
| 4.8 | null | null | null | null | 471356.8 | 1016557 | 2325520 | 4231971 | 6733011 | 1.01E+07 |
| 4.75 | null | null | null | null | null | 604508.9 | 1216882 | 2643375 | 4642813 | 7210274 |
| 4.7 | null | null | null | null | null | null | 748144.7 | 1440520 | 3002344 | 5108817 |
| 4.65 | null | null | null | null | null | null | null | 905893.3 | 1691984 | 3407001 |
| 4.6 | null | null | null | null | null | null | null | null | 1082206 | 1976452 |
| 4.55 | null | null | null | null | null | null | null | null | null | 1282367 |
Tab. 1: Výstup ve formě tabulky.
Vyvinuto v rámci projektu GAČR 14-17997S – Globální citlivostní analýza v nelineární stavební mechanice, podporovaného Grantovou agenturou České republiky. Domovská stránka aplikace MapPoEng je http://mappoeng.kitnarf.cz.
[1] Wikipedia, the free encyclopedia: Potential energy, http://en.wikipedia.org
[2] Wikipedia, the free encyclopedia: XML, http://en.wikipedia.org
[3] Wikipedia, the free encyclopedia: Notepad, http://en.wikipedia.org
[4] Wikipedia, the free encyclopedia: Vim, http://en.wikipedia.org
[5] Wikipedia, the free encyclopedia: PSPad, http://en.wikipedia.org
[6] Frantík Petr: Diskrétní model FyDiK2D, Sborník mezinárodní konference Modelování v mechanice 2009, VŠB-TU Ostrava, Česká republika, květen 2009, 10 stran, ISBN 978-80-248-2016-3
[7] Frantík Petr: FuVis, aplikace pro vizualizaci funkcí dvou proměnných, http://fuvis.kitnarf.cz, 2015.